- 论文 - 《Adaptive Keyframe Sampling for Long Video Understanding》
- 代码 - Github
- 关键词 - 自适应抽帧、多模态大模型MLLM、相关性、覆盖度、采样
1 引言
- 研究问题
- MLLMs 通过将视觉输入作为额外的标记注入到 LLMs 中作为上下文,然而,当视觉输入从单张图像变为长视频时,会导致视频标记的数量巨大,远远超出 MLLMs 的最大处理能力。
- 现有的工作和不足
- 现有的基于视频的MLLMs大多依赖于从输入数据中采样少量标记,这可能导致关键信息丢失,从而产生错误的答案。
- 本文工作
- 提出了一种简单而有效的算法,称为自适应关键帧采样(Adaptive Keyframe Sampling, AKS)。
- 该算法引入了一个即插即用的模块——关键帧选择,旨在在固定数量的视频标记下最大化有用信息。
- 作者将关键帧选择问题建模为一个优化问题,包含两个方面:
- 相关性:利用视觉-语言(VL)模型计算每个候选帧与输入提示之间的相关性;
- 覆盖度:通过将视频递归划分为多个区间(bins),统计每个区间内的关键帧数量,从而估计覆盖度。
- 单独最大化相关性或覆盖度可产生简单基线,而自适应关键帧采样(AKS)算法在两者之间实现合理权衡,能够实现最优的视频理解效果。
2 相关工作
- LLM 和 MLLM
- 为了扩展LLMs以实现视觉理解,学术界致力于将视觉与语言数据对齐到统一的特征空间中。目前的方法主要分为两类:
- 内部适配(internal adaptation),例如通过在LLM内部引入交叉注意力机制来实现视觉-语言对齐;
- 外部适配(external adaptation),例如通过训练额外的模块来达成相同目标。
- 通过上述方法,视觉基础模型逐渐演进为 MLLMs。
- 为了扩展LLMs以实现视觉理解,学术界致力于将视觉与语言数据对齐到统一的特征空间中。目前的方法主要分为两类:
- 基于视频的 MLLMs
- 早期工作包括 VideoChat [18]、Video-ChatGPT [26]、VideoLLaMA [50]、Video-LLaVA [20]、LanguageBind [56] 和 Valley [25] 等。
- 不同于静态图像,视频的视觉标记往往超出 MLLM 的最大上下文容量,因此大部分方法通过采样的方法来适配输入限制,例如:Video-ChatGPT [26],引入了更高效的视频特征表示。
- 面向长视频理解的 MLLMs
- 长视频理解面临更大挑战,尤其是关键帧选择的难度显著增加,容易导致关键信息严重丢失。
- 尽管一些 MLLM 采用具有更大上下文容量的语言模型,以编码和处理更多帧,但更多方法则设计了特定策略来缓解该问题,例如:
- MovieChat [34] 引入了短期和长期记忆库来压缩并保留视频内容;
- MA-LMM [11] 和 VideoStreaming [30] 使用Q-former和小型语言模型(phi-2 [12])来压缩视频数据;
- LongVLM [42] 采用标记合并(token merging)技术以减少视频标记数量;
- Goldfish [2] 将短视频理解与信息检索相结合,以回答复杂查询。
- 局限:这些方法旨在减少视频标记数量,但通常无法保证视频中的关键信息得以保留。
3 方法
3.1 预备知识
视频理解的定义:
- 输入:一段视频片段 V \in \mathbb{R}^{(T×W×H×C)} 和一条文本指令 \mathbf{Q}
- 输出:一个文本答案
- 处理流程:
- 视每一帧为一张图像 \mathbf{V}_t(t \in \{1, 2, ..., T\}),提取视觉标记 \mathbf{F}_t
- 采用一个标准的 MLLM G(\{\mathbf{F}_t\}),其处理视频理解任务的模板为:[User: ⟨video-tokens⟩ ⟨text-instruction⟩ Assistant: ],其中视频标记和文本指令通过 MLP 投影到相同的特征空间。
- (为简化表述,这里省略语言模型部分,仅关注视觉标记作为上下文的作用)
- 困难:在处理长视频时面临困难。
本文目标,设计一个选择函数 KS_M(\mathbf{Q}, \mathbf{F}),该函数输出一个索引集合 \mathcal{I} ⊆ \{1, 2, ..., T\},且 |\mathcal{I}| = M ,表示选出的 M 个最优关键帧(M 根据 MLLM 的上下文容量预先设定)。从这些关键帧中提取的视频标记(即 \{\mathbf{F}_t | t \in KS_M(\mathbf{Q}, \mathbf{F})\} ) 构成 MLLM 的上下文。
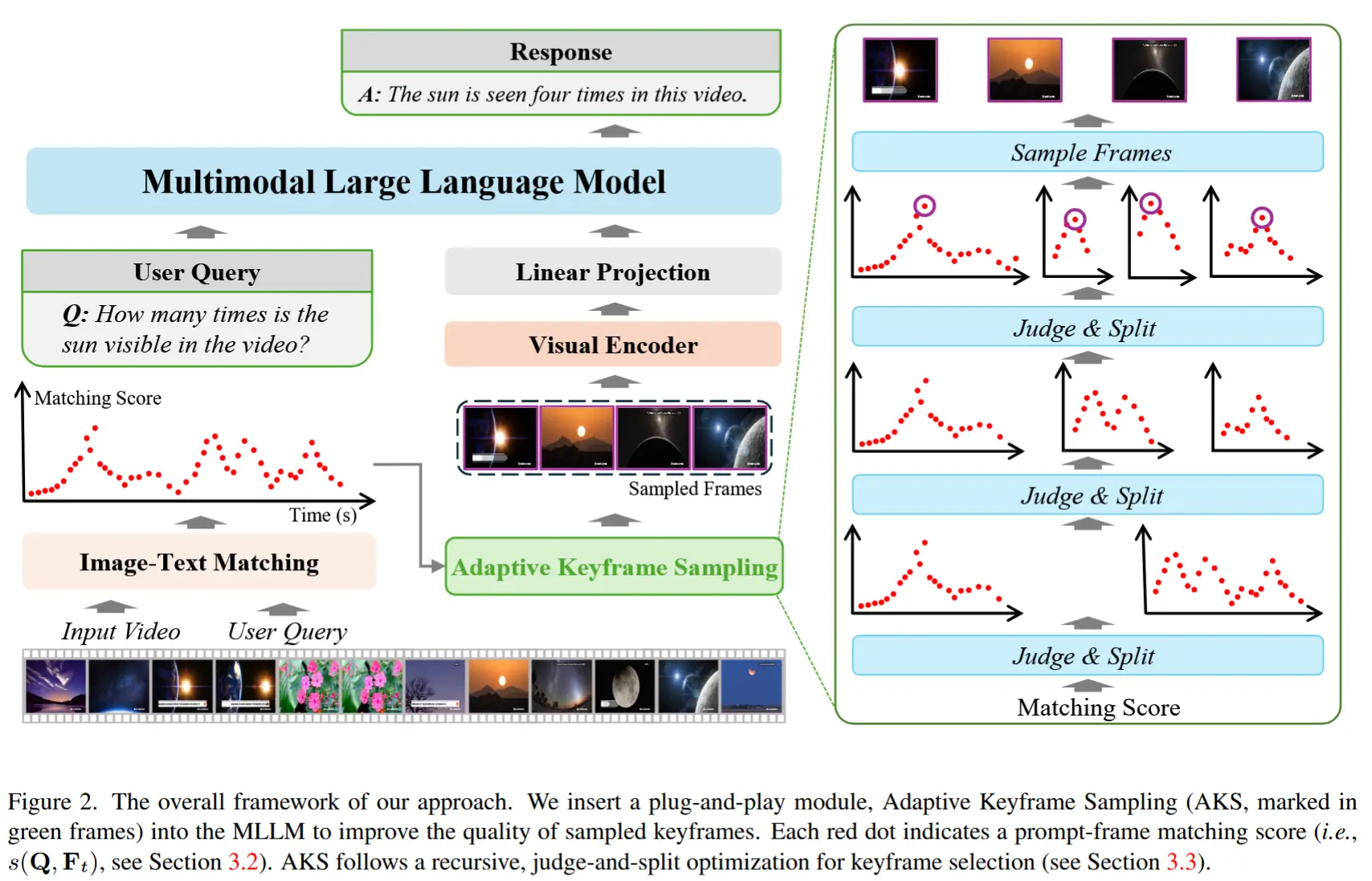
本文方法的整体框架如图2所示。
3.2. 关键帧选择的原则
关键帧选择函数 \text{KS}_M(\mathbf{Q}, \mathbf{F}) 的目标是最大化有用信息的总量,即:
这里,假设 G'(\cdot) 是 G(\cdot) 的互补函数,表示 MLLM 对其输出的置信度。公式 (1) 在数学上难以求解,原因有两个:(1)优化问题涉及指数级数量的候选集合 \mathcal{I} ;(2)函数 G'(\cdot) 难以估计,因为关键帧选择任务缺乏监督信号——即使存在训练集,且可以将 G(\cdot) 的输出与真实答案进行比较,也无法保证一个正确答案对应一组完美的关键帧,反之亦然。
为此,作者提出一种启发式方法来近似公式 (1)。直观上,当满足以下两个条件时,一组关键帧具有较高的信息量:
- 每一帧与提示之间的相关性较高,即视觉数据对回答问题有帮助;
- 所选帧在时间上的覆盖度足够,能够全面回答问题。
需要注意的是,覆盖度难以量化,但是条件二与防止冗余帧被选中密切相关,因为在关键帧总数固定的情况下,选择过多相似帧会减少其他有用信息的容量,从而损害整个关键帧集合的时间覆盖能力。
基于上述分析,重新表述公式 (1) 的右侧,得到:
其中,我们引入两个量:
- s(\mathbf{Q}, \mathbf{F}_t) 表示提示 \mathbf{Q} 与第 t 帧 \mathbf{F}_t 之间的相关性;
- c(\mathcal{I}) 表示整个关键帧集合在时间轴上的覆盖度;
- \lambda 是用于平衡的超参数。
计算 s(\mathbf{Q}, \mathbf{F}_t) 。
这需要一个视觉-语言(VL)模块来衡量帧 \mathbf{F}_t 是否包含回答问题 \mathbf{Q} 所需的信息(MLLM 自己可以承担这一角色,但计算成本太高)。在实际应用中,选择使用更轻量级的 VL 模型(例如 CLIP 或 BLIP ITM )。
估计 c(\mathcal{I}) 。
衡量覆盖度是一个开放性问题,与数据分布的均匀性密切相关。在数学中,Ripley 的 K -函数 [33] 是一种常用的度量均匀性的方法。给定时间戳集合 \mathcal{I} 和任意搜索半径 r < T , r 的 K -函数记为 \hat{K}(r) ,其值与满足 |t_i - t_j| < r 的帧对 (t_i, t_j) 的数量成正比。若 \hat{K}(r) 近似与 r^2 成正比,则认为时间分布是均匀的(即覆盖了整个时间轴)。
为了将 K -函数应用于覆盖度计算(该任务与均匀性密切相关但略有不同),并降低计算开销,作者引入宽度为 r 的分桶,并将指示函数 \mathbb{I}(|t_i - t_j| < r) 近似为判断 t_i 和 t_j 是否落在同一桶中。采用递归划分策略:
- 在第一层,设置两个宽度为 T/2 的桶,即将时间轴 [0, T) 划分为两个不重叠区间:[0, T/2) 和 [T/2, T)。设这两个区间中的关键帧数量分别为 m_1 和 m_2 ,则覆盖度惩罚项为 |m_1 - m_2| ,因为分布不均意味着某些时间段的关键帧较少,覆盖较弱。
- 在第二层,每个子区间进一步划分为两个子桶,继续相同计算。
- 递归过程持续到第 L 层,其中 L \leq \lceil \log_2 M \rceil 为超参数。
3.3. 自适应关键帧采样
由于覆盖度函数 c(\mathcal{I}) 的定义较为复杂,难以对公式 (2) 进行闭式或精确优化。本节讨论一种近似求解方法。与仅依赖于相关性得分 s(\mathbf{Q}, \mathbf{F}_t) 的基线方法相比,称此类考虑时间戳信息以提升关键帧选择质量的方法为“时间戳感知优化”。
首先讨论两个特殊情况:
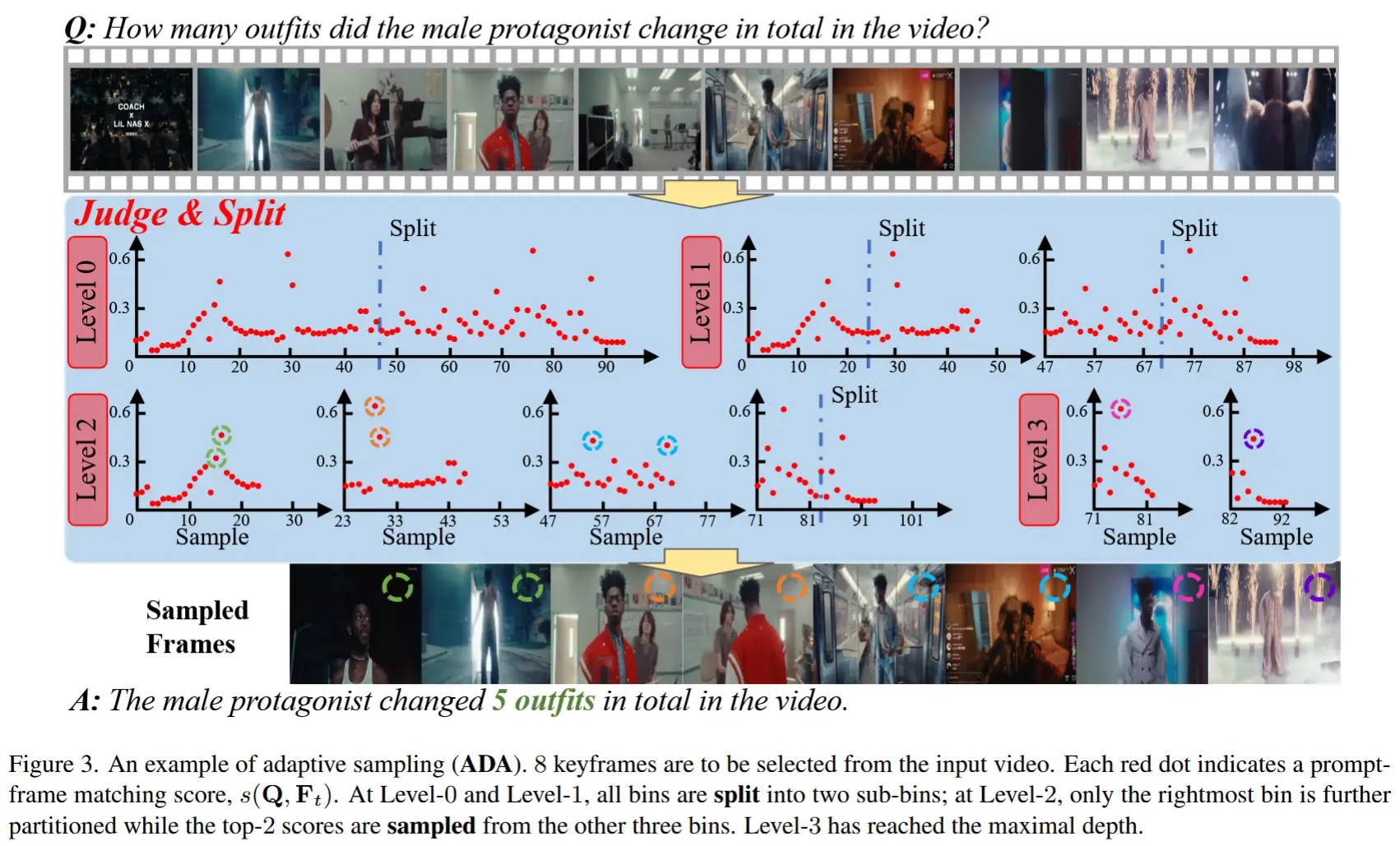
(1) 当 \lambda = 0 (即忽略覆盖度)时,公式 (2) 可通过简单选取得分最高的前 M 帧来求解。将此策略命名为 TOP,意为“顶部采样”;如图 5 所示,在某些情况下,该方法会导致所有关键帧集中在短时间内,从而使 MLLM 在其他时刻丢失重要信息。
(2) 当 \lambda \to +\infty (即严格保证覆盖度)时,公式 (2) 的解是:在每个分桶中选择得分最高的帧作为关键帧(当分桶数量超过 M 时,保留得分最高的若干帧)。我们称该策略为 BIN,简称“分桶采样”。若使用一个恒定得分的虚拟视觉-语言模型(即 s(\mathbf{Q}, \mathbf{F}_t) 对所有 t 都相同),则该策略退化为均匀采样基线,作者将其命名为 UNI,即“均匀采样”。
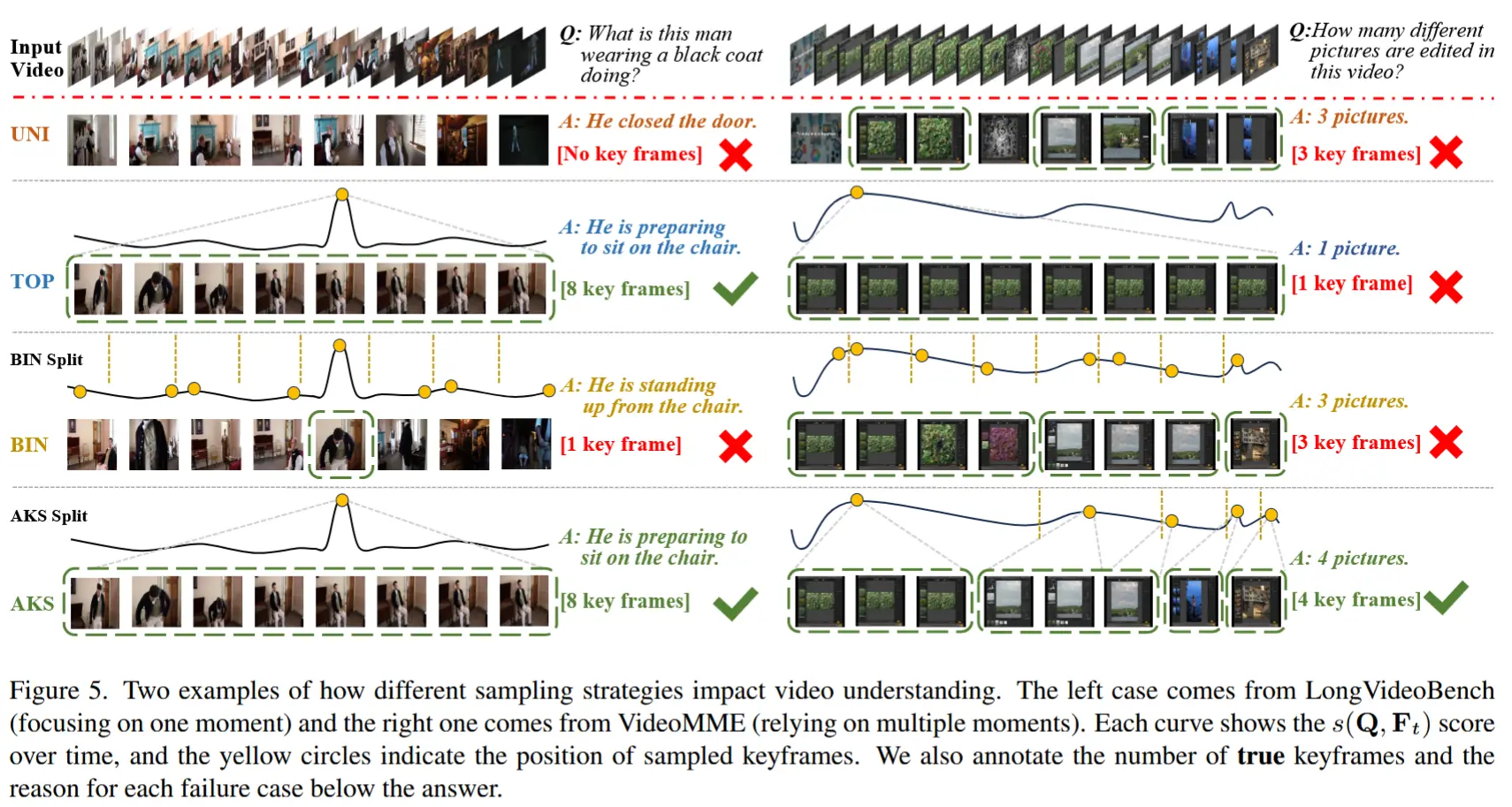
在其他情况( 0 < \lambda \ll +\infty )下,采用一种层次化的优化方法,遵循 c(\mathcal{I}) 的定义。在第一层,需要决定如何将 M 个关键帧分配到两个时间区间 [0, T/2) 和 [T/2, T) 中。回顾所有帧的相关性得分 s(\mathbf{Q}, \mathbf{F}_t) ,计算所有帧的平均得分(记为 s_{\text{all}} )以及得分最高的 M 帧的平均得分(记为 s_{\text{top}} )。如果只需选择一个关键帧,或者 s_{\text{top}} - s_{\text{all}} 超过某个阈值 s_{\text{thr}} ,作者认为应优先保证高分帧被选中(即最大化公式 (2) 的第一项),因此算法直接返回得分最高的前 M 帧作为关键帧。否则,将当前区间划分为两个子区间,并将关键帧数量均等分配(即最大化公式 (2) 的第二项),然后递归调用上述程序处理子区间。作者称该策略为 ADA,简称“自适应采样”。需要注意的是,超参数 \lambda 并未显式调节,其作用由 s_{\text{thr}} 替代。
图 3 通过一个例子展示了自适应采样(ADA)的工作过程。ADA 是 TOP 和 BIN 两种极端情况之间的折衷方案。