![[MIT6.5940] Lect 11 TinyEngine and Parallel Processing](/upload/宏村.webp)
一、Introduction to Edge AI
- 边缘设备在我们的日常生活中是无处不在的和功率广泛的应用:智能手机、机器人、车辆、办公设备、无线电收发器、自动售货机及家庭电器等。
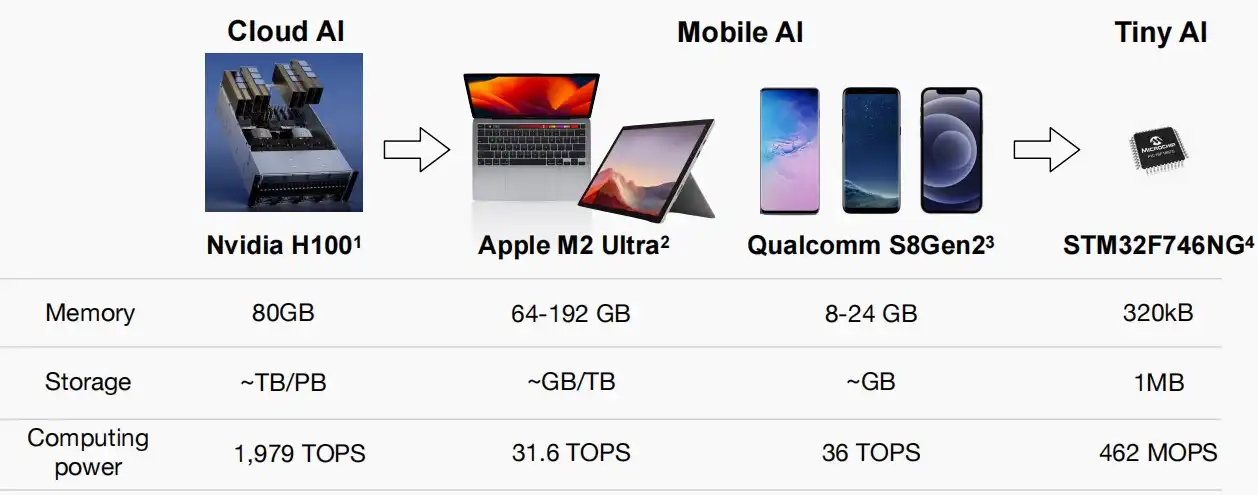
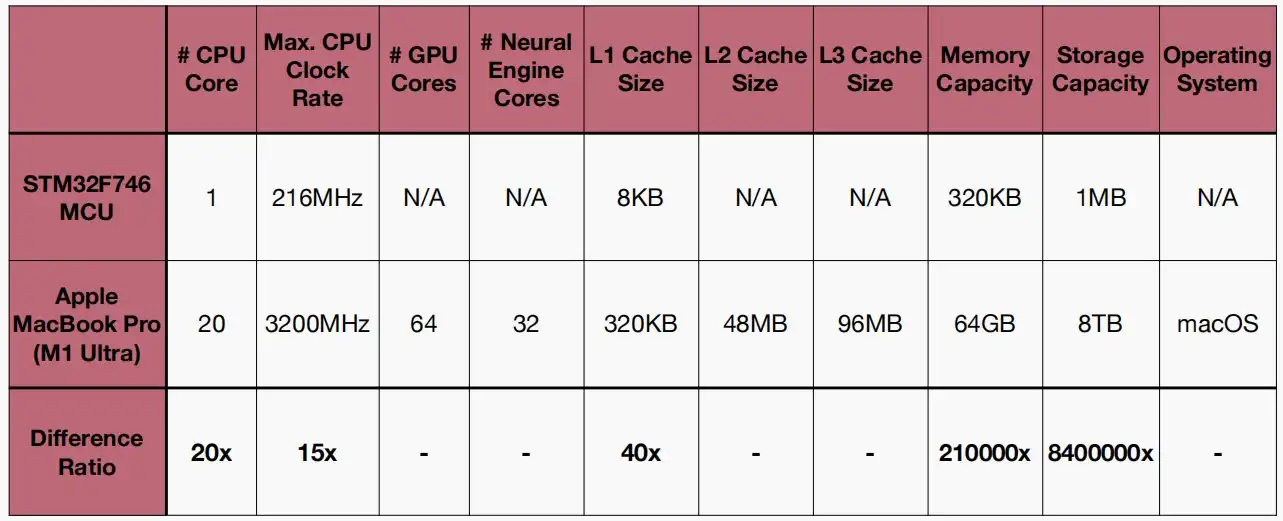
- 从云计算到边缘计算,这一转变凸显了资源有限的挑战。如下图对比了云计算与边缘计算常见设备的资源量。
二、Parallel computing techniques
-
并行计算技术有利于边缘设备利用有限的资源进行机器学习。
- 并行计算技术不仅有助于小型机器学习,也有助于大型机器学习。对于大型机器学习模型,我们有许多空间在不同维度上并行化计算。
- 并行计算技术对于推理和训练都很重要。
-
第二章将介绍四种广泛应用于小型和大型机器学习的并行计算技术
- Loop optimization循环优化
- SIMD(single instruction, multiple data) programming
- Multithreading多线程
- CUDA programming
Ⅰ、Loop optimization
- Loop optimization主要涵盖以下三个子概念
- Loop reordering循环重排
- Loop tiling循环整理
- Loop unrolling循环展开
Loop reordering循环重排
- 定义:通过重新排序循环的序列来优化局部性。
- 局部性:在操作系统课程中,我们知道系统会将最近访问的块从磁盘装入主存中,以便下一次快速读取,而数组中相邻的数往往存储在同一个块中,一起被装入主存。
- 对于机器学习中,存在大量卷积和矩阵乘法,都涉及到张量的运算。因此考虑循环中的局部性影响,有利于优化运行速度和开销。
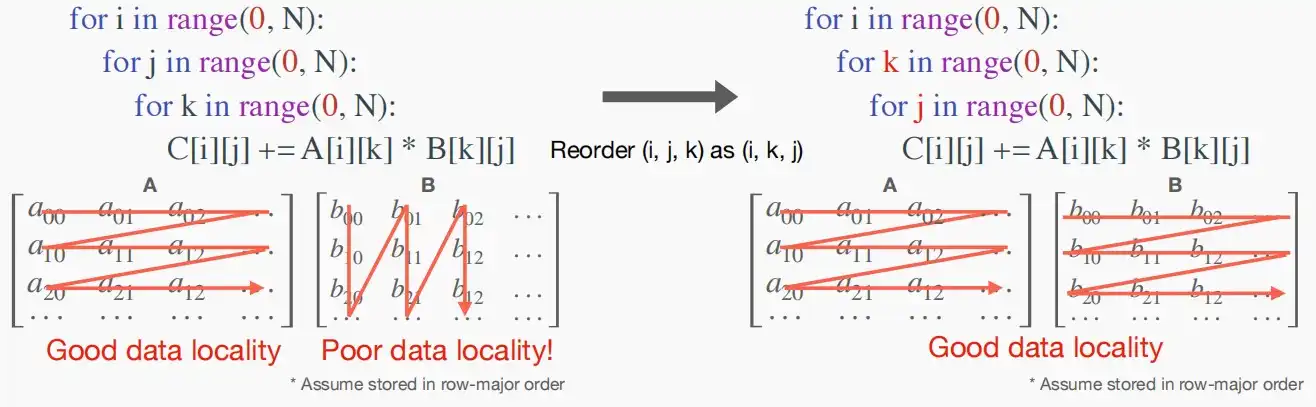
- 如下图中,对于矩阵乘法C = A * B,有两种循环方式(i,j,k)和(i,k,j),明显后者的局部性更好。
- 对于(i,j,k)的循环方式,矩阵B局部性较差,每一次访问几乎都会导致缺页中断,降低运行速度。
- 对于(i,k,j)的循环方式,矩阵A和B的局部性都很好,但是矩阵C的局部性相对较差,但是仍是一行一行访问,权衡之下局部性更好。
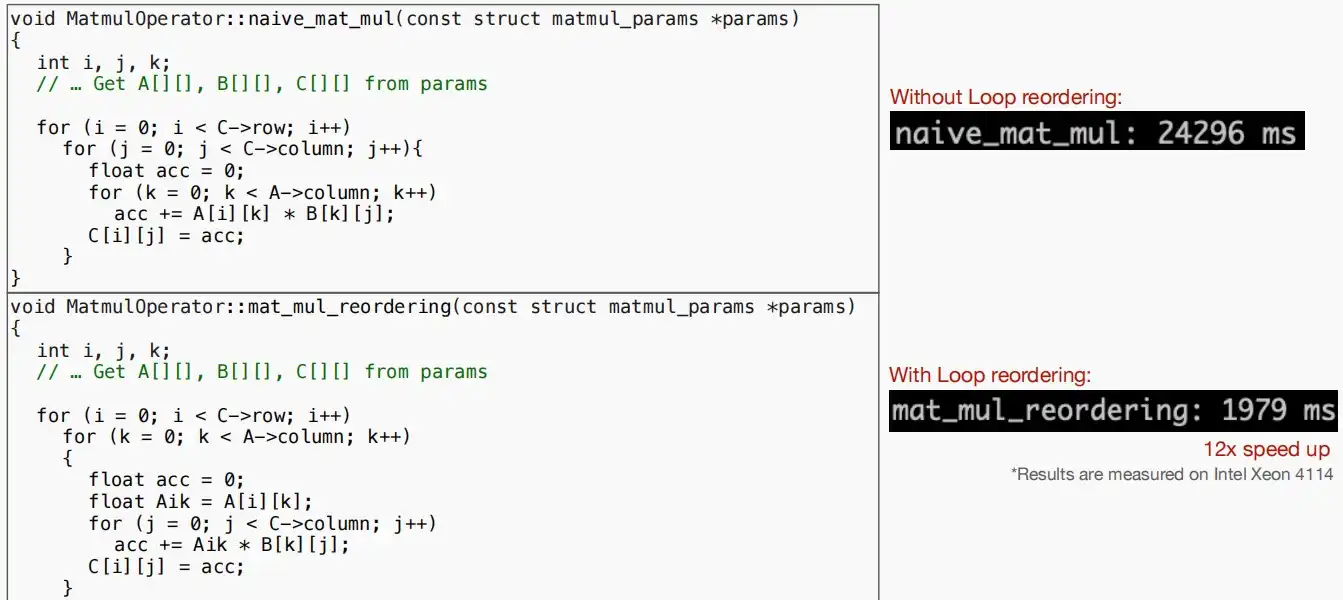
- 从实验数据可以看出,改进后的运行时间从24296ms降低至1979ms。可见Loop reordering对程序局部性的提升效果显著。
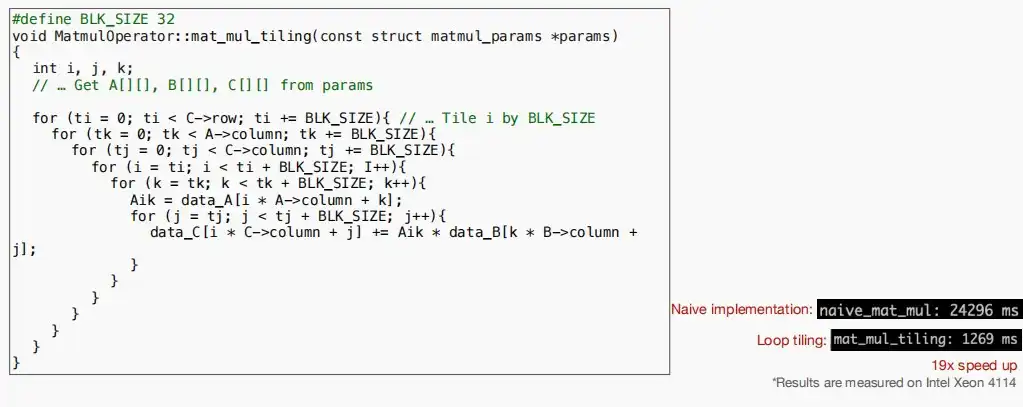
Loop tiling循环整理
- 定义:通过划分循环的迭代空间来减少内存访问。
- 如果数据比缓存大小大很多会怎么样?
- 缓存中的数据被再次使用前被释放,导致缺页中断次数增加。
- Loop tiling循环整理如何减小缺页中断
- 分区循环迭代空间
- 使得循环中的访存数据适应缓存大小
- 确保数据在被再次使用前留在缓存中
-
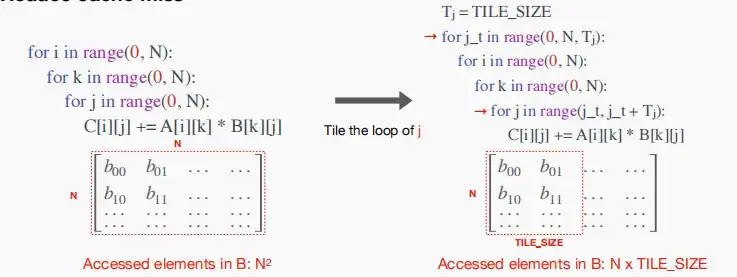
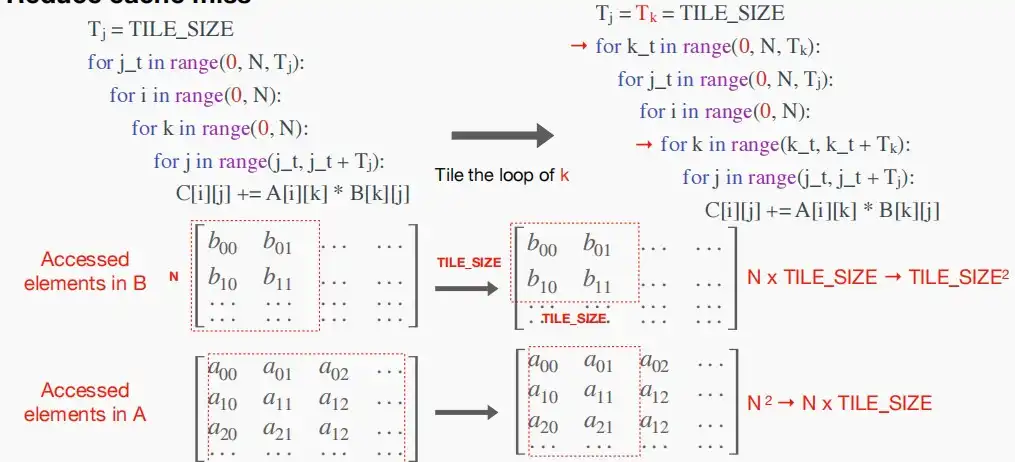
如下三张图,对(i,k,j)依次循环进一步优化,依次对(j,k,i)进行分块处理,划分为大小为TILE\_SIZE的块,使得每次访问的大小满足小于缓存大小,减少缺页中断。
- 对j进行分块处理,划分为每次遍历大小为TILE\_SIZE,则矩阵B每次访问的大小从N^2变为N*TILE\_SIZE。
- 对k也进行分块处理。则矩阵B每次访问的大小变为TILE\_SIZE^2,矩阵A每次访问的大小变为N*TILE\_SIZE。
- 对i进行分块处理,则矩阵A每次访问的大小变为TILE\_SIZE^2,且矩阵C每次访问的大小也变为TILE\_SIZE^2。
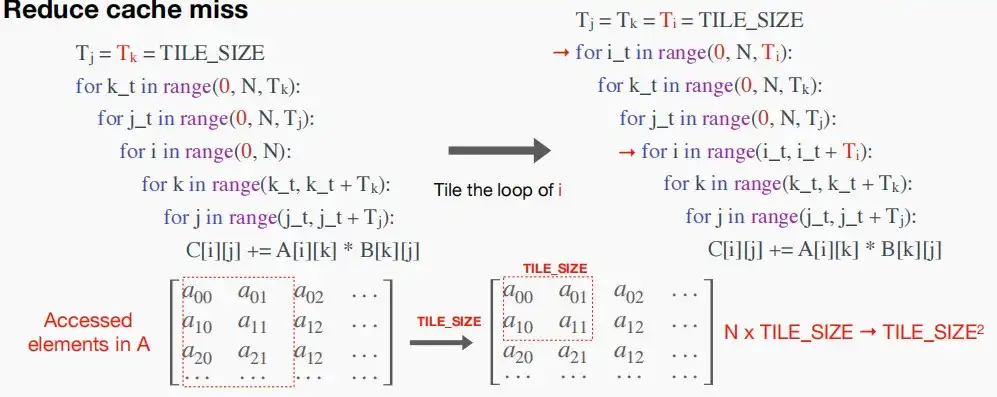
- TILE\_SIZE的大小可以根据高速缓存的大小来确定。
- 每次访问的数据大小适配缓存大小->重用缓存中的数据数增加->缓存缺失数下降。
- 多级整理机制:对于存在多级缓存的平台,还可以进一步考虑各级缓存的大小,例如下图中进一步划分j,使得最小的三个循环即每次访问的数据大小等于L1 Cache,最小的四个循环访问数据大小等于L2 Cache。
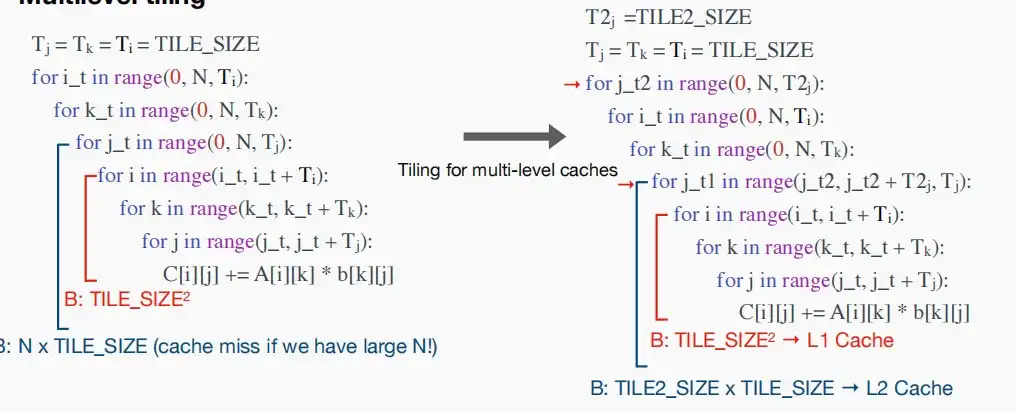
- 如下图通过六个循环进行循环整理后,运行时间从24296ms降低到1269ms。
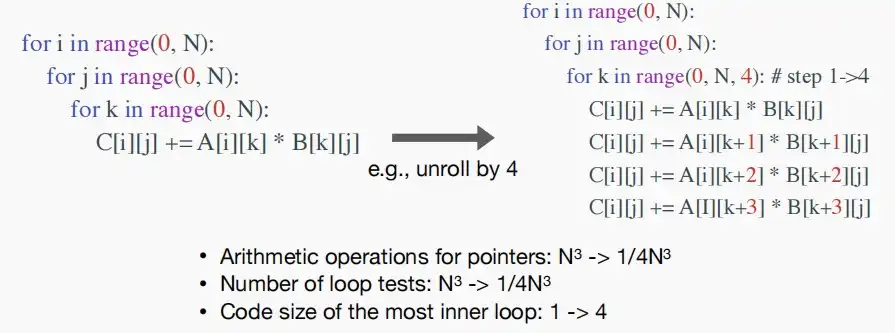
Loop unrolling循环展开
- 定义:以牺牲其二进制文件的大小为代价来减少分支开销。
- 循环控制造成的开销
- 指针的算术操作
- 循环结束条件测试
- 分支预测
- 通过循环展开减小的开销
- 每次重复循环体
- 权衡二进制大小和减小的开销
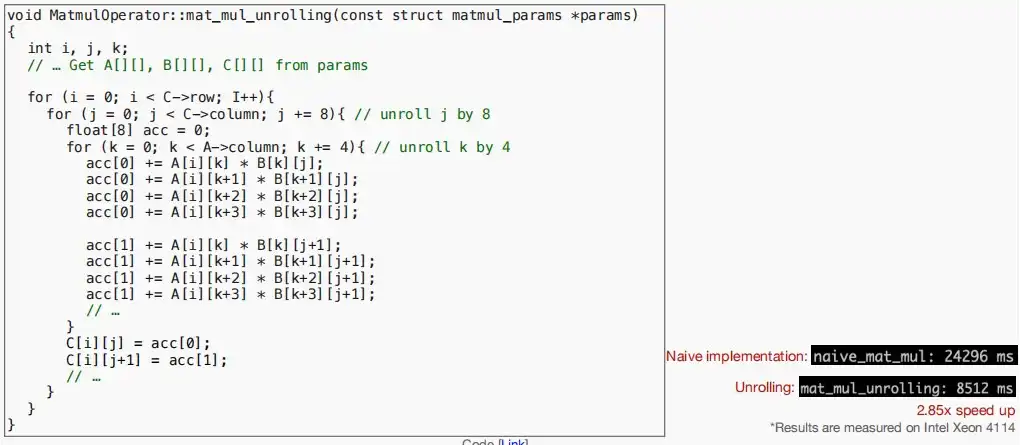
- 如图,对原循环进行改进,每一次循环执行四个步长的k
- 对指针的算术操作:N^3 -> 1/4N^3
- 循环结束条件测试:N^3->1/4N^3
- 最内部循环的代码大小:1->4
- 效果如下
Ⅱ、SIMD programming
- 定义:对多个数据点同时执行相同的操作。通过将同一指令应用于多个数据,使得它们相互同步,避免控制开销和指令开销。
- 关键特点
- 向量寄存器:可以保存和处理多个数据元素的专用寄存器。
- 向量操作:用于整个向量的算术和逻辑运算。
- 优点
- 提高计算吞吐量和速度
- 提高能效
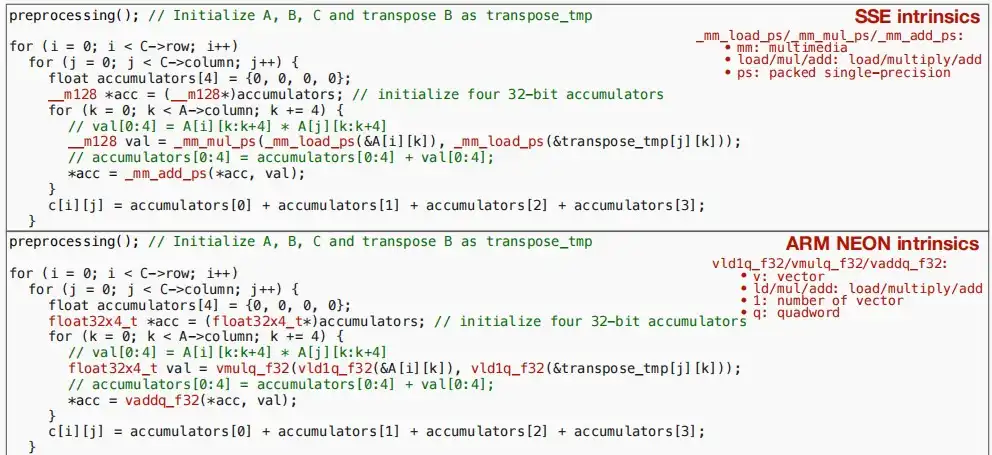
- 例子:Intel的SSE指令集 & ARM的Neon指令集
- SSE和Neon都是SIMD类型的指令集,它们都有类似指令可以一次性处理四个32位操作数的运算。
- SSE
- _mm_load_ps、_mm_mul_ps:mm代表多媒体,load代表加载到寄存器,ps代表压缩单精度。
- Neon
- vld1q_f32、vmulq_f32:v代表向量、ld表示load,mul表示乘法,1表示向量数,q表示quadword四字。
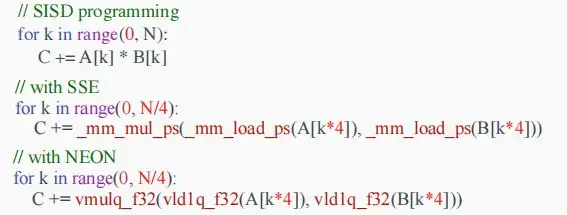
- 下图是使用SSE和Neon指令进行矩阵乘法的示例代码,需要注意的是transpose_tmp是矩阵B的转置,以实现loop reordering的同样效果。
Ⅲ、Multithreading
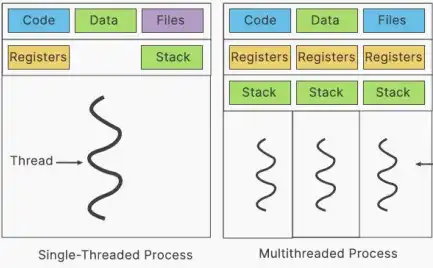
- 定义:多线程是指在单个进程中并发执行多个线程。
- 线程
- 最小的执行单元是线程,最小的资源分配单元是进程,线程共享进程中的资源。
- 线程共享相同的内存空间和资源,但它们有自己的堆栈和程序计数器。
- 不同的线程可以在不同的CPU核心上运行,从而提高性能并允许并行性。
- 多线程的优点
- 改进的性能:多个线程可以同时执行任务,提高总体程序速度。
- 响应性:一个程序可以对用户的输入保持响应而不受阻塞。
- 资源利用率:线程可以共享资源,减少了创建多个进程的开销。
- 简化的程序结构:多线程可以帮助将复杂的问题分解为更简单、更小的任务。
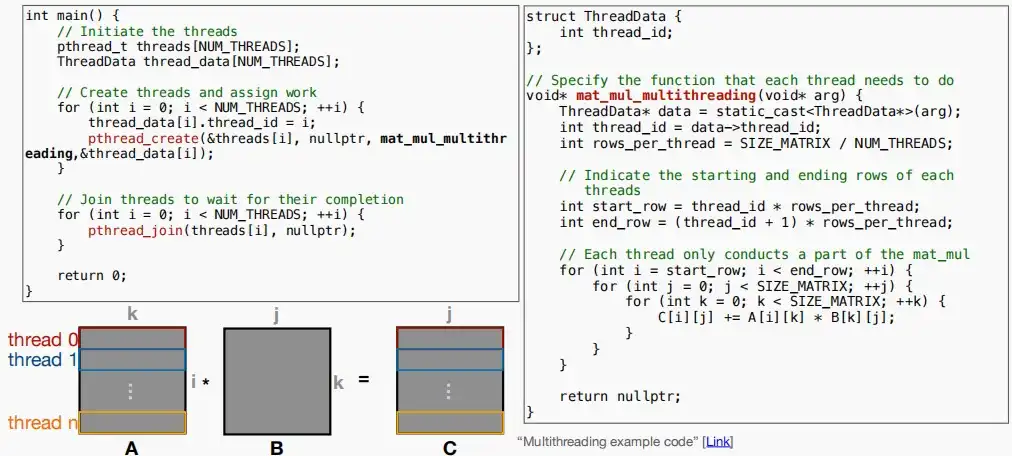
- 介绍两种实用的用于编写多线程程序的库-Pthreads和OpenMP
- 使用多线程时加速矩阵乘法,需要将矩阵分割成若干部分,每个线程负责其中一部分。通常按照行分割矩阵A,减少线程间通信,使其工作相互独立。
- 如下图,通过Pthreads库来设计多线程,加速矩阵乘法的代码示例。优化后运行时间从24296ms降低到5864ms。
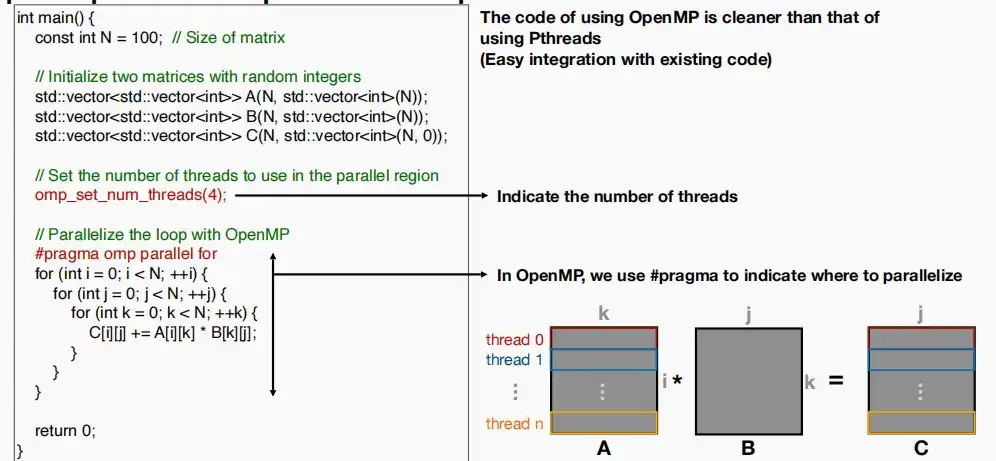
- OpenMP
- 特点
- 一个共享内存的并行编程模型
- 适用于C,C++,Fortran
- 可跨不同平台和操作系统
- 易于与现有代码集成
- 适用于各种处理器
- 如下图,通过OpenMP库来设计多线程,加速矩阵乘法的代码示例,相比于Pthreads代码更加简洁,仅需两行即可实现并行。
- 特点
Ⅳ、CUDA programming
- 定义:使用gpu来加速计算。
- 介绍
- 图形处理单元(GPU)提供了更高的指令吞吐量和内存带宽。
- CUDA是由英伟达在2006年推出的,作为一个通用的并行计算平台和编程模型,它利用了Nvidia gpu中的并行计算引擎。
- CUDA类似C语言,用来表示使用计算模式的硬件接口在gpu上运行的程序。
- 如图为CUDA线程的层次结构
- 绿色的为线程块,大小为2×3;橙色的为其中一个线程块中的线程,大小为3×4。因此总共有72个cuda线程。
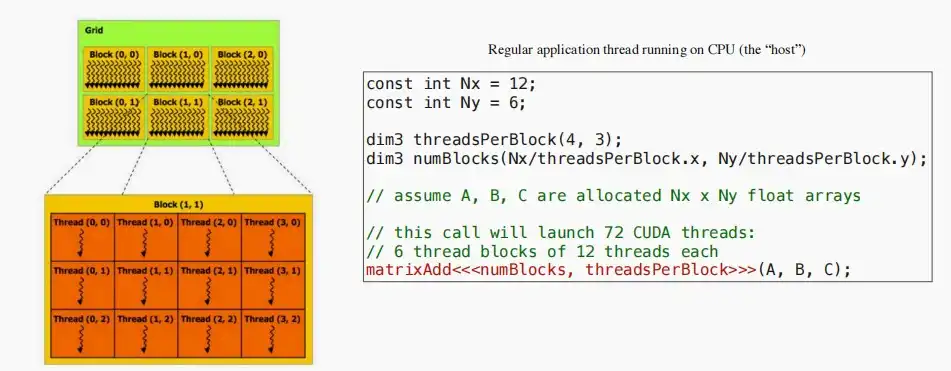
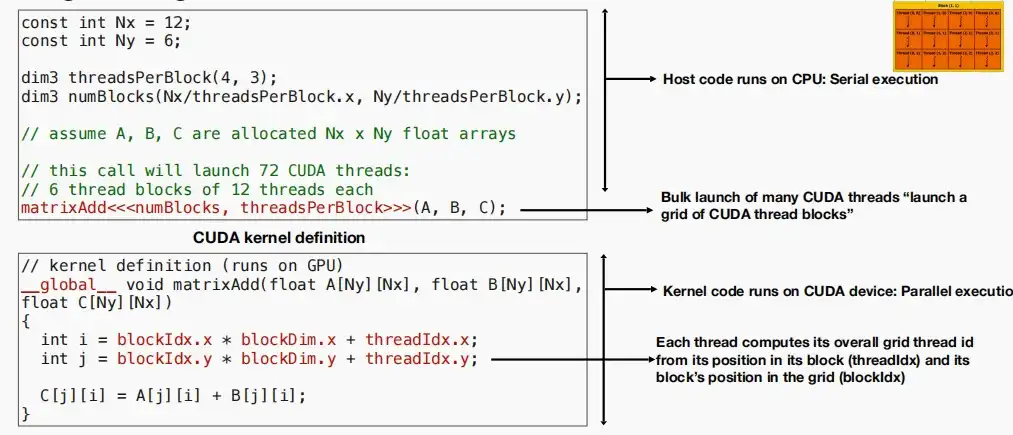
- 如下图是CUDA编程示例代码
- 上方代码为主机代码,在CPU上串行执行。负责为矩阵ABC分配内存,并启动CUDA线程。
- 下方代码为CUDA内核代码,在GPU上执并行执行。每个线程从其在块中的位置(threadIdx)和其块在网格中的位置(blockIdx)计算其整体网格线程id。
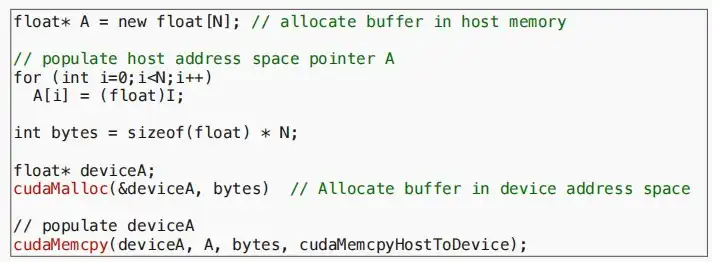
- 先前我们假设矩阵ABC均已分配,现在重新来了解它们的分配方式。
- CUDA编程中有两个地址,一个是主机地址即CPU内存地址空间,另一个是设备内存地址。数据可以在两个地址空间内移动,但我们希望尽量减少移动。注意,我们无法从主机CPU代码段访问GPU内存。
- 下图代码中
- “A[i] = (float)I;”是填充主机地址空间指针A。
- “cudaMalloc(&deviceA, bytes);”是在设备GPU地址空间中分配缓冲区。
- “cudaMemcpy(deviceA, A, bytes, cudaMemcpyHostToDevice);”是将数据从CPU复制到GPU。
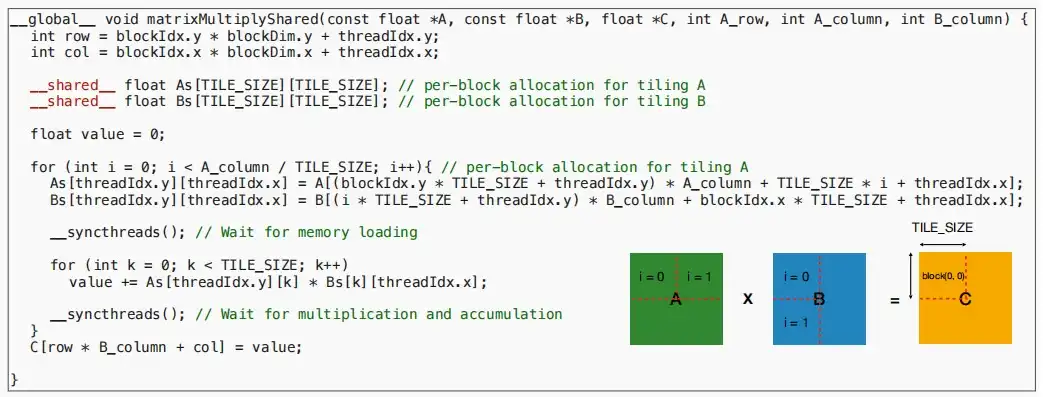
- 对内核可见的三种不同类型的地址空间
- 私有内存(每个线程)、共享内存(每个块)、全局内存
- 私有内存访存最快,空间最小;全局内存访存最慢,空间最大。
- 不同的地址空间->不同的位置->不同的负载/存储开销
- 私有内存(每个线程)、共享内存(每个块)、全局内存
- 如下图,使用CUDA算法加速矩阵乘法,原运行时间24296ms,优化后在GPU运行时间258ms,CUDA内核运行时间6.796ms。
三、Inference optimizations
- 推理优化目的:提高计算速度,减少内存使用
- 本章介绍以下四种技术:
- Image to Column (Im2col) convolution
- In-place depth-wise convolution
- NHWC for point-wise convolution, and NCHW for depth-wise convolution
- Winograd convolution
Ⅰ、Image to Column (Im2col) convolution
- 定义:重新排列输入数据以直接利用矩阵乘法核。
- Im2col是一种通过广义矩阵乘法(GEMM)实现卷积的技术。
- 下图是原本的卷积操作
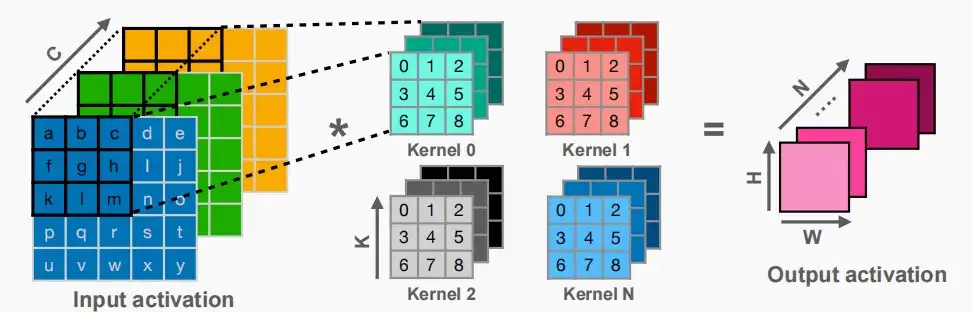
- 利用Im2col技术将输入和内核都变化为矩阵,实际上就是将每次参与运算的两个矩阵展开成一个一维的向量,两个矩阵的乘法变成一维向量的点积,则整个输入和内核的卷积变成两个矩阵的乘法,类似于降维。参考im2col可以更好理解。
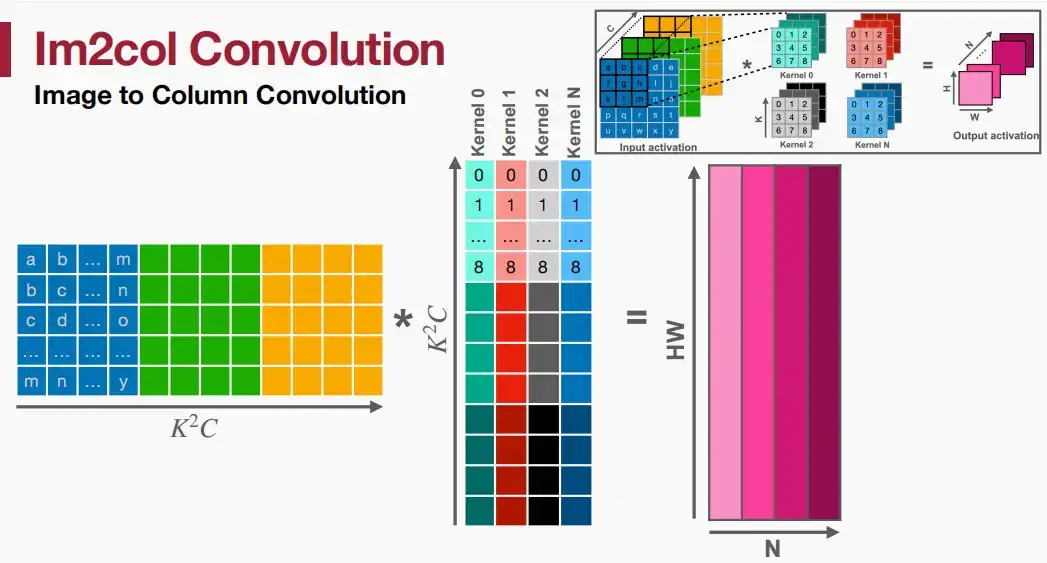
- 优缺点
- 优:利用经过良好优化的GEMM进行卷积。
- 缺:增加额外的内存使用(从上图也可以看出,输入激活的大小明显增大,大约2/3的内存重复),隐式GEMM可以解决额外的内存使用问题。
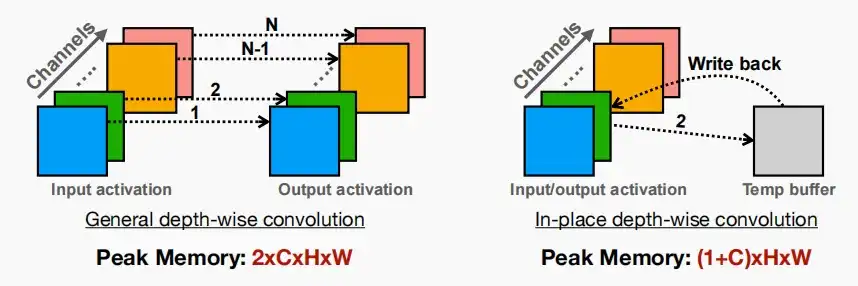
Ⅱ、In-place depth-wise convolution
- 定义:重用输入缓冲区写入输出数据,以减少峰值SRAM内存。
- 许多流行的神经网络模型,如MobileNetV2,都具有深度卷积的“反向残差块”,减少了模型大小和FLOPs,但显著增加了峰值内存。
- 为了减少深度卷积的峰值内存,我们使用了带有临时缓冲区的“就位”更新策略。
Ⅲ、How to Choose the Appropriate Data Layout
- 针对不同类型的卷积,利用适当的数据布局。
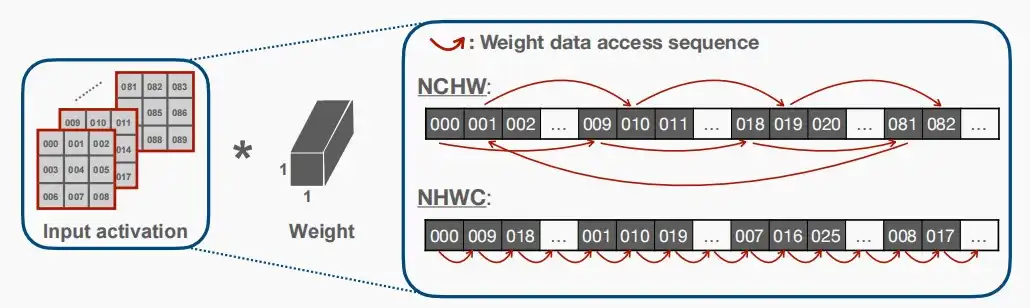
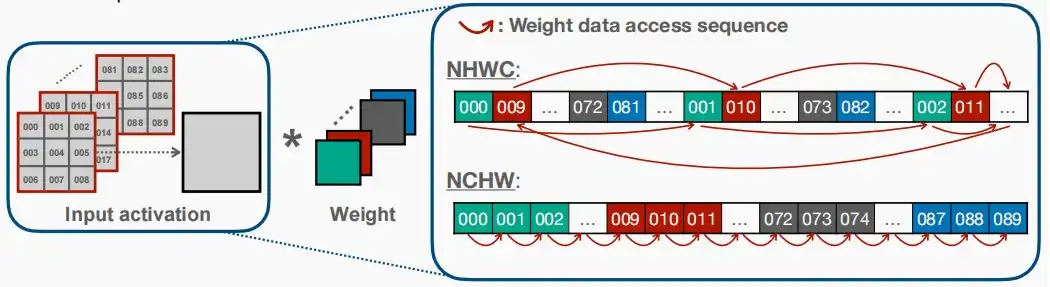
- Use NHWC for Point-wise Convolution
- 一般来说,由于有更多的顺序访问,NHWC比NCHW在point-wise卷积方面具有更好的局部性。
- 如下图右框中的权重数据访问顺序,NHWC和NCHW具有不同的存储顺序,对于point-wise卷积显然NHWC连续访问更好。
- Use NCHW for Depth-wise Convolution
- 我们将访问激活,并在NCHW序列中进行深度卷积。
- 由于有更多的顺序访问,NCHW在深度卷积方面比NHWC具有更好的局部性。
Ⅳ、Winograd convolution
- 减少乘法的次数,以提高卷积的计算速度。
- 具体讲解可以自行搜索Winograd convolution,参考:卷积神经网络中的Winograd快速卷积算法、Fast Algorithms for Convolutional Neural Networks。