- 论文 - 《MOS: MODEL SYNERGY FOR TEST-TIME ADAPTATION ON LIDAR-BASED 3D OBJECT DETECTION》
- 代码 - Github
- 关键词 - LiDAR、3D目标检测、TTA、ICLR2025 Oral
摘要
- 问题背景
- 基于 LiDAR 的 3D 目标检测在实际部署中常因域偏移而导致性能下降。
- 大多数研究集中于跨数据集的偏移,但由传感器差异和天气条件引起的实际损坏问题仍未得到充分探索。
- 本文方法
- 提出了一种 模型协同(Model Synergy, MOS)策略
- 该策略 动态选择具有多样化知识的历史检查点,并将它们 组合起来 以最佳适配当前测试批次。
- 组合由本文提出的 协同权重(Synergy Weights, SW) 指导,SW 对选定检查点进行加权平均,从而减少组合模型中的冗余。
- SW 通过 评估测试数据上预测边界框的相似性 以及模型库中 检查点对之间特征的独立性 来计算。
- 为了保持高效且信息丰富的模型库,会 丢弃平均 SW 分数最低的检查点,并用新更新的模型替换它们。
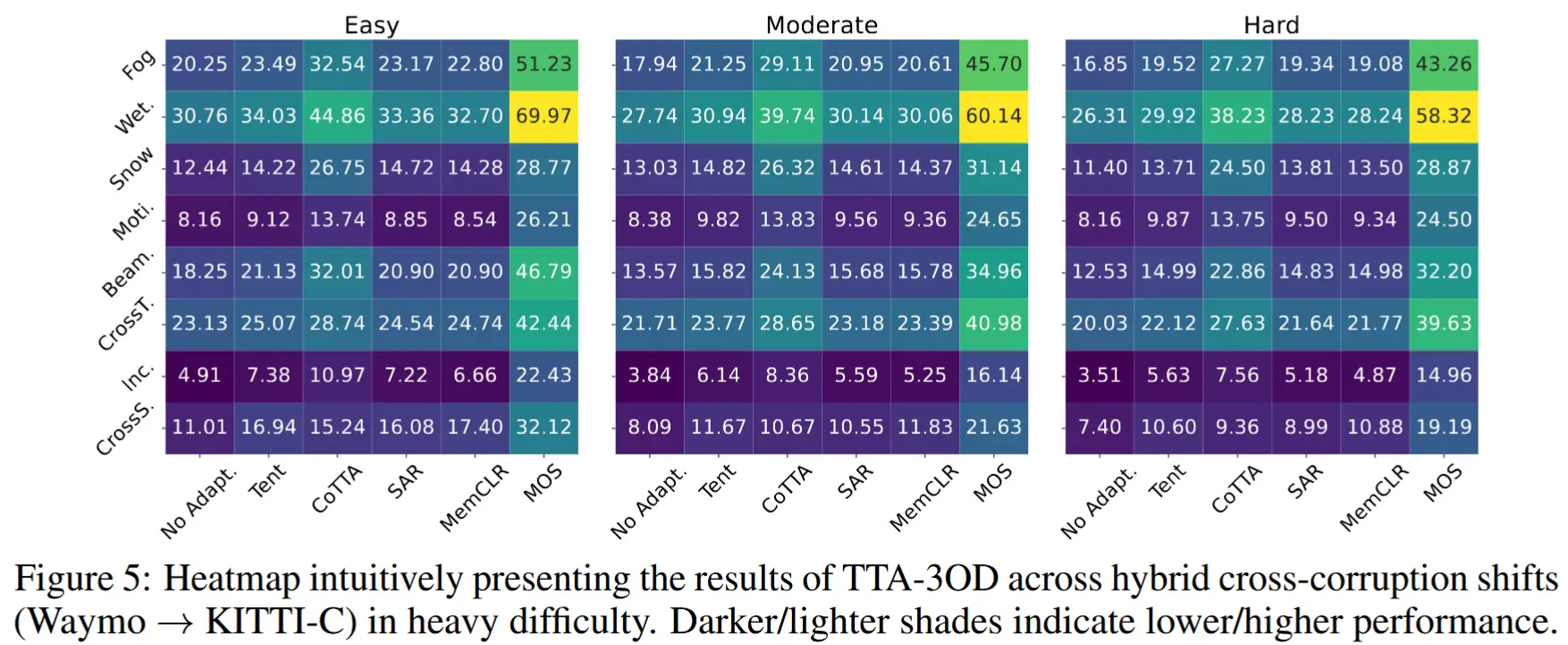
- 考虑了一种更具挑战性的跨损坏场景,即跨数据集偏移与损坏同时发生。
- 提出了一种 模型协同(Model Synergy, MOS)策略
- 实验
- 我们的方法在三个数据集和八种损坏类型上经过严格测试,相较于现有的测试时适应策略展现了卓越的适应能力,特别是在动态场景和条件下表现出色。值得注意的是,在具有挑战性的跨损坏场景中,我们的方法实现了 67.3% 的性能提升,为适应性提供了一个更全面的基准。
1 引言
-
cross-curruption 跨损坏
- 过去的工作研究了跨数据集场景(例如从 nuScenes 到 KITTI )、或者对干净数据集添加扰动(例如从 KITTI 到 KITTI-C )。
- 然而,在真实场景中,偏移通常并非源自单一因素,这促使我们提出了一种新的混合偏移,称为跨损坏, 其中 跨数据集差距和损坏噪声在 3D 场景中共存。
-
无监督域适应 (UDA) vs. 测试时适应 (TTA)
- UDA 通过 多轮自训练 结合 伪标签技术 对目标数据进行处理,或通过强制源域和目标域数据之间的 特征级对齐 来学习域不变表示。尽管有效,但这些基于 UDA 的方法 需要对预先收集的目标样本 进行离线多轮训练。(耗时、不适用实时数据流场景)
- TTA 主要通过以下两种方式实现:(1) 选择一小部分网络参数进行更新;(2) 使用均值教师模型提供一致的监督信号。
-
动机:使用均值教师模型的方法平等的对待所有先前检查点
- 2D 目标检测工作:MemCLR (VS 等, 2023) 将 TTA 的思想扩展到基于图像的 2D 目标检测,通过基于 Transformer 的记忆模块提取并优化每个检测目标的感兴趣区域(RoI)特征。
- 针对 3D 检测模型的 TTA 未被探索,因此作者首先调查这些 TTA 技术在 3D 检测任务中的有效性。
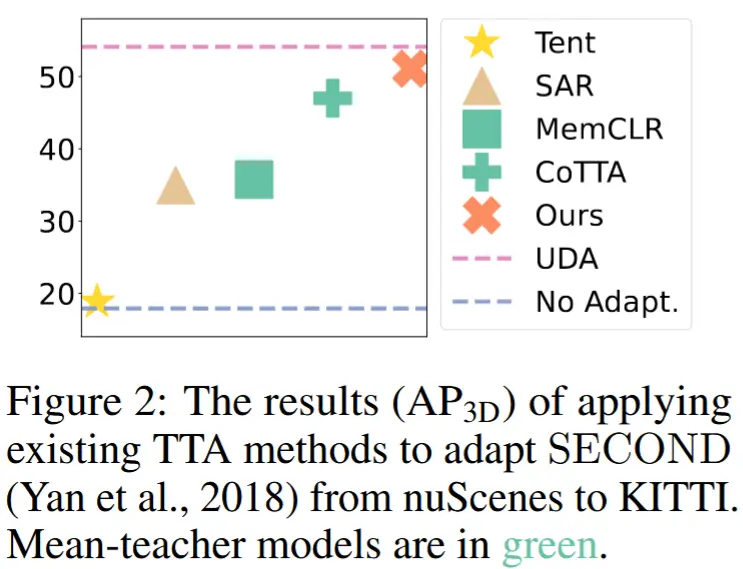
- 如图 2 所示,使用均值教师模型的方法(MemCLR 和 CoTTA)优于其他方法。然而,通过对每个测试样本的移动平均(EMA)平等对待所有先前检查点,教师模型可能无法回顾并利用不同检查点中最重要的知识。
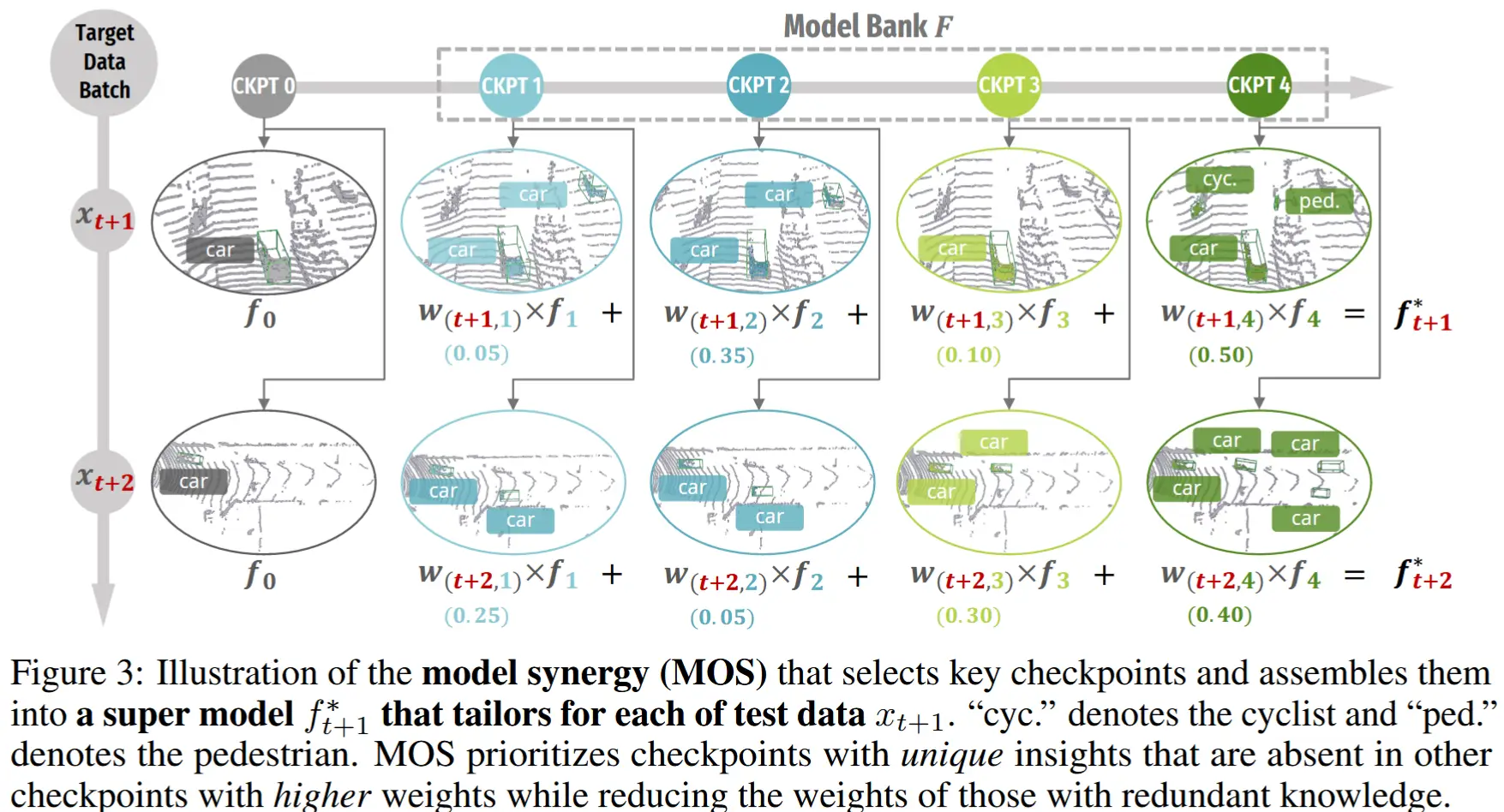
- 图 3 显示了测试点云 x_{t+1} 和 x_{t+2} 具有非常不同的特征,而教师模型仍然依赖于统一的知识集(即由 EMA 生成的),未能利用针对特定场景定制的先前检查点的相关见解。因此,没有任何教师模型能够完美适配所有目标样本。
- 改进目标:一个最优的“超级”模型应动态组装以适配每个测试批次。
- 本文方法:模型协同 Model Synergy, MOS
- 基本思想:该策略能够巧妙地选择并组装最适合的先前检查点,形成一个统一的超级模型,利用长期信息来指导当前测试批次数据的监督。
- 如何“选择并组装检查点”?
- 引入了 协同权重(Synergy Weights, SW) 的概念,通过加权平均先前训练的检查点来促进模型组装。
- 建立了一个模型协同库(model synergy bank),用于保存 K 个先前适配的检查点。
- 例如,图 3 中为了组装一个针对 x_{t+1} 的模型,由于冗余的边界框预测,检查点 1 和 3 被分配较低的 SW,而检查点 4 由于有汽车人和行人的概念,被分配较高的 SW。
- 如何“确定最佳的SW”?
- 将此问题重新表述为求解一个线性方程,目标是创建一个 既多样化又与所有检查点保持相似性 的超级模型,同时 避免对任何特定检查点的偏倚。
- 这个线性方程的闭式解涉及计算逆 Gram 矩阵,该矩阵量化了检查点对之间的相似性。为此,我们设计了两种针对 3D 检测模型的 相似性函数:
- (1) 输出级 ,通过匈牙利匹配算法计算 3D 边界框的预测差异;
- (2) 特征级 ,通过计算拼接特征图的矩阵秩来评估特征独立性。
- 通过对每个新的测试批次计算这些相似性,我们确定了构建超级模型所需的 SW。随后,这个超级模型生成伪标签,用于在当前时间戳对模型进行单次迭代训练。
- 如何“缓解检查点保存的内存成本”?
- 引入了一种动态模型更新策略,在添加新检查点的同时移除最不重要的检查点。
- 实验结果表明,MOS 仅在模型库中保留 3 个检查点的情况下,优于组装最新的 20 个检查点,并且内存消耗减少了 85%。
2 提出方法
2.1 整体框架
(问题定义)
3D 目标检测的测试时适应(TTA-3OD):当在源数据集上预训练的 3D 检测模型被部署时,由于实际条件的变化,测试点云 (x_t\}_{t=1}^T 可能会发生偏移或损坏,其中 x_t 表示测试数据流中的第 t 个测试点云。TTA-3OD 的最终目标是在推理过程中,通过单次传递将 3D 检测模型适应到一系列目标场景。
(MOS核心思想)
针对每个测试批次 x_t,识别出具有独特知识的最适合的历史模型,并将它们组装成一个超级模型 f_t^*,以促进测试时的模型适应。为此,我们建立了一个大小为 K 的模型库 F = \{f_1, \dots, f_K\},用于保存和协同之前训练的模型。
(整体框架)
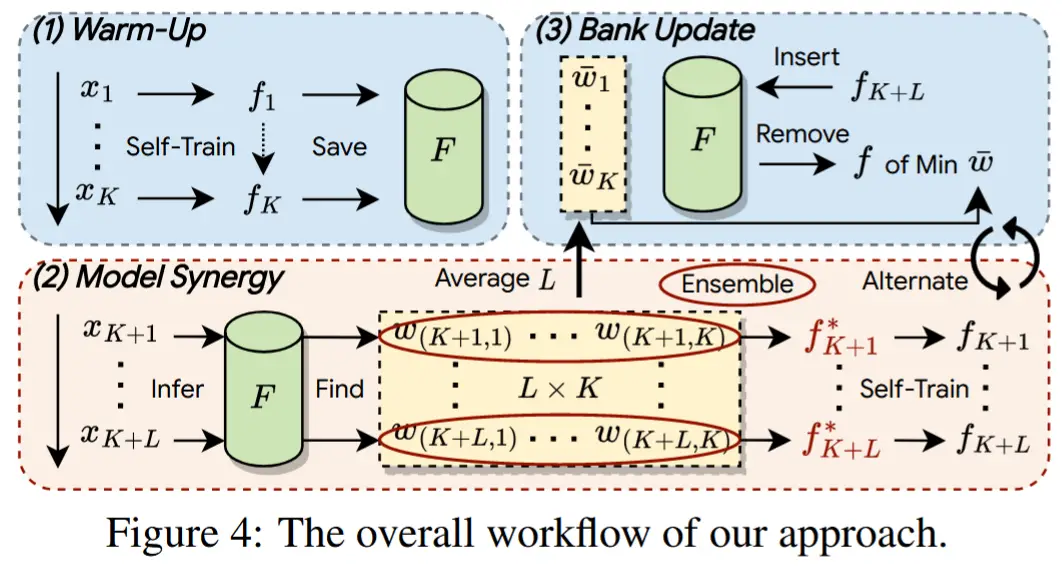
MOS 方法总体工作流程分为三个阶段,如图 4 所示。
- 阶段 1 :预热 Warm-up
- 最初,当模型库 \mathbf{F} 尚未填充时,我们通过伪标签自训练的方式使用前 K 个到达的目标批次来训练模型。我们在每个时间戳保存模型为一个检查点,\{f_1, \cdots, f_K\},并将它们存入 \mathbf{F},直到其容量达到 K。
- 阶段 2 :模型协同 Model Synergy
- 一旦 \mathbf{F} 被填满,对于后续的每个测试批次 x_t,\mathbf{F} 中的检查点被组装成一个超级模型 f_t^* 以生成伪标签 \hat{\mathbf{B}}^t 用于监督。例如,如图 4 的阶段 2 所示,在推断 x_{K+1} 时,我们通过 \mathbf{F} 组装超级模型为 f_{K+1}^* = w_{(K+1,1)}f_1 + \cdots + w_{(K+1,K)}f_K。然后,伪标签 \hat{\mathbf{B}}^{K+1}由 f_{K+1}^* 生成,用于对当前模型 f_{K+1} 进行单次迭代训练。当测试了 L 个批次后,我们更新模型库。
- 阶段 3 :模型库更新
- 为了保持模型库 \mathbf{F} 的紧凑性,同时确保每个模型持有独特的知识,我们动态更新 \mathbf{F} 以固定其大小为 K。每测试 L 个批次,我们就用新训练的 f_t 替换 \mathbf{F} 中冗余知识最多的检查点。阶段 2 和阶段 3 交替进行,直至所有目标样本 \{x_t\}_{t=1}^T 均被测试完毕。
2.2 模型协同
阶段 1 比较简单直观,没有详细介绍。
2.2.1 最优协同权重的超级模型组装
对于每个批次 x_t,我们假设存在最优的协同权重 \mathbf{w} \in \mathbb{R}^K,用于线性组装模型库 \mathbf{F} 中的历史检查点为一个超级模型 f_t^*,如下所示:
为了简化表示,我们使用相同的符号 f_t 表示模型参数。最优的协同权重 \mathbf{w} 可以通过 求解以下线性方程 得出:
该方程可以分解为两部分:(1) (\mathbf{F}^T \mathbf{F})^{-1}:Gram 矩阵的逆;(2) \mathbf{F}^T f_t^*:模型库 \mathbf{F} 中每个模型与超级模型 f_t^* 之间的成对相似性。理想情况下,这些相似性应均匀分布,确保 f_t^* 对 \mathbf{F} 中的任何单个模型保持无偏,从而实现多样化的长期知识自然融合。因此,我们可以将公式 (2) 简化为:
接下来,计算 Gram 矩阵 \mathbf{G} = \mathbf{F}^T \mathbf{F},它捕获了模型库 \mathbf{F} 中 任意两个模型 (f_i, f_j) 的参数相似性,如下所示:
其中 \langle f_i, f_j \rangle 表示模型参数 f_i 和 f_j 的内积。基于 \mathbf{G} 捕获的相似性,其逆矩阵 \mathbf{G}^{-1} 实际上优先考虑高方差的方向(多样化信息),并惩罚低方差的方向(重复信息)。
2.2.2 广义 Gram 矩阵的逆矩阵
(优化Gram逆矩阵) 虽然 Gram 矩阵的逆矩阵是有效的,但通过模型参数 f_i 和 f_j 的内积来评估相似性并不理想,因为具有不同参数的模型在相同的输入测试批次 x_t 上 可能会产生相似的预测。因此,为了针对每个输入批次 x_t 进行定制,我们比较了一对模型 (f_i, f_j) 的中间特征和最终边界框预测结果。为此,我们提出了 一个特征级相似性函数 S_{\text{feat}}(\cdot; \cdot) 和 一个输出级边界框集合相似性函数 S_{\text{box}}(\cdot; \cdot),以有效量化任意两个 3D 检测模型之间的差异。
(优化公式3和4) 通过用提出的相似性函数替换内积,原始的 Gram 矩阵 \mathbf{G} 转变为一个专门设计用于 3D 检测器的广义版本 \widetilde{\mathbf{G}}。结合公式 (3) 和公式 (4),我们可以计算 \widetilde{\mathbf{G}} 和最优协同权重 \widetilde{\mathbf{w}} 如下:
其中每个元素表示模型库 \mathbf{F} 中每对历史 3D 检测模型 (f_i, f_j) 的 特征和预测相似性。
(聚合得到超级模型) 超级模型 f_t^* 通过所有历史检查点 \mathbf{F} \in \mathbb{R}^K 加权线性聚合,权重为 \widetilde{\mathbf{w}} \in \mathbb{R}^K,如下所示:
其中协同后的超级模型 f_t^* 用于指导当前模型 f_t 的监督。如图 4 (第2.1节中)所示,对于时间 t 的测试样本,组装后的 f_t^* 生成稳定的伪标签 \hat{\mathbf{B}}^t,并通过单次迭代训练 f_{t-1} \to f_t,如下所示:
其中 \text{aug}(\cdot, \cdot) 表示 应用于伪标签目标点云的数据增强操作。回顾公式 (5),我们引入了一个特征级相似性函数 S_{\text{feat}}(\cdot; \cdot) 来评估 中间特征图 (\mathbf{z}_i, \mathbf{z}_j) 之间的独立性,并引入了一个输出级相似性函数 S_{\text{out}}(\cdot; \cdot) 来 衡量边界框预测 (\mathbf{B}^i, \mathbf{B}^j) 之间的差异,其中 (\mathbf{z}_i, \mathbf{z}_j) 和 (\mathbf{B}^i, \mathbf{B}^j) 由模型库 \mathbf{F} 中的任意一对模型 (f_i, f_j) 生成。
2.2.3 特征级相似性 S_{\text{feat}}
(利用秩评估) 为了评估特征图 (\mathbf{z}_i, \mathbf{z}_j) 之间的相似性,我们利用 特征矩阵的秩 来确定 \mathbf{z}_i 中的特征向量相对于 \mathbf{z}_j 中的特征向量之间的 线性依赖关系。特征图中的每个单个特征向量编码了 3D 场景中一个小 receptive field 的信息。在推断输入批次 x_t 时,如果 \mathbf{z}_i 中的一个特征向量与 \mathbf{z}_j 中的另一个特征向量线性独立,则意味着 \mathbf{z}_i 和 \mathbf{z}_j 要么捕获来自不同 receptive field 的信息,要么关注相同的区域但以不同的方式解释信息。
为了计算这些依赖关系,我们将 \mathbf{z}_i \oplus \mathbf{z}_j 进行 拼接 ,并计算其秩 \text{rank}(\cdot),该秩标识了线性独立特征向量的最大数量。\mathbf{z}_i \oplus \mathbf{z}_j 的秩越高,表示特征的多样性越大,因为较少的特征向量可以被其他向量线性组合。 为了加速计算,我们通过计算特征矩阵的核范数来近似 \text{rank}(\cdot) 。对于输入批次 x_t,检测模型对 (f_i, f_j) 之间的特征级相似性 S_{\text{feat}} 可以通过以下公式确定:
其中 \mathbf{z}_i, \mathbf{z}_j 分别由 f_i 和 f_j 生成。H, W, D 表示特征图的高度、宽度和维度,而 D 是 \text{rank}(\cdot) 的最大可能值。S_{\text{feat}} 的取值范围为 0 到 1, S_{\text{feat}} 的值越高,表示 \mathbf{z}_i 和 \mathbf{z}_j 之间的特征独立性越低,从而导致由模型 f_i 和 f_j 生成的 特征图更相似。
2.2.4 输出级边界框相似性 S_{\text{box}}
(集合匹配问题) 为了评估边界框预测 (\mathbf{B}^i, \mathbf{B}^j) 之间的相似性,我们将其视为一个 集合匹配问题,因为 \mathbf{B}^i 和 \mathbf{B}^j 分别表示一组预测的边界框,其大小可能不同。为了解决这个问题,作者应用匈牙利匹配算法,这是一种用于二分图匹配的鲁棒方法,确保两组边界框预测之间达到最佳的一对一对应关系。我们将较小的边界框集合用 \emptyset 填充以使两组集合的大小相等为 N。为了确定这两个等大小集合之间的最优二分匹配,匈牙利算法被用来找到一个排列 p \in \mathbf{P},使得成本最低:
其中 \mathbf{B}_n^i 是模型 f_i 预测的集合 \mathbf{B}^i 中的第 n 个边界框。边界框损失 \mathcal{L}_{\text{box}}(\cdot; \cdot) 通过交并比(IoU)加上覆盖中心坐标、尺寸和方向角度的 L1 距离来计算,涉及一对边界框:\mathbf{B}_n^i 和由 p(n) 索引的相应边界框。指示函数 \mathbb{1}_{\{c_n^i \neq \emptyset\}} 表示仅当第 n 个对象的类别不是填充的 \emptyset 时才计算成本。下一步是计算所有匹配边界框对的总匈牙利损失:
其中 \tilde{p} 是在公式 (9) 中计算出的最优分配。我们使用 sigmoid 函数将结果归一化到与 S_{\text{feat}} 相同的范围。S_{\text{box}} 的值越高,表示模型 f_i 和 f_j 预测的重叠边界框越多。
2.3 模型库更新
如图 4 所示,在适应每 L 个样本 \{x_l, x_{l+1}, \cdots, x_L\} 时,单个检查点 f_i \in \mathbf{F} 参与 L 次组装,从而计算并存储一组协同权重 \{w(l,i), w(l+1,i), \cdots, w(L,i)\}。给定 \mathbf{F} 中的 K 个检查点,定义协同矩阵为 \mathbf{W} = (w(l,k))_{l=1,k=1}^{L,K} \in \mathbb{R}^{L \times K}。在推断完 L 个批次后,我们在 L 维度上取平均值,计算每个检查点的 平均协同权重,表示为:
最后,我们 移除平均协同权重最低的模型,并将当前模型 f_t 添加到模型库中,如下所示:
其中 i 表示 \bar{\mathbf{w}} 中最小平均协同权重的索引。
3 实验
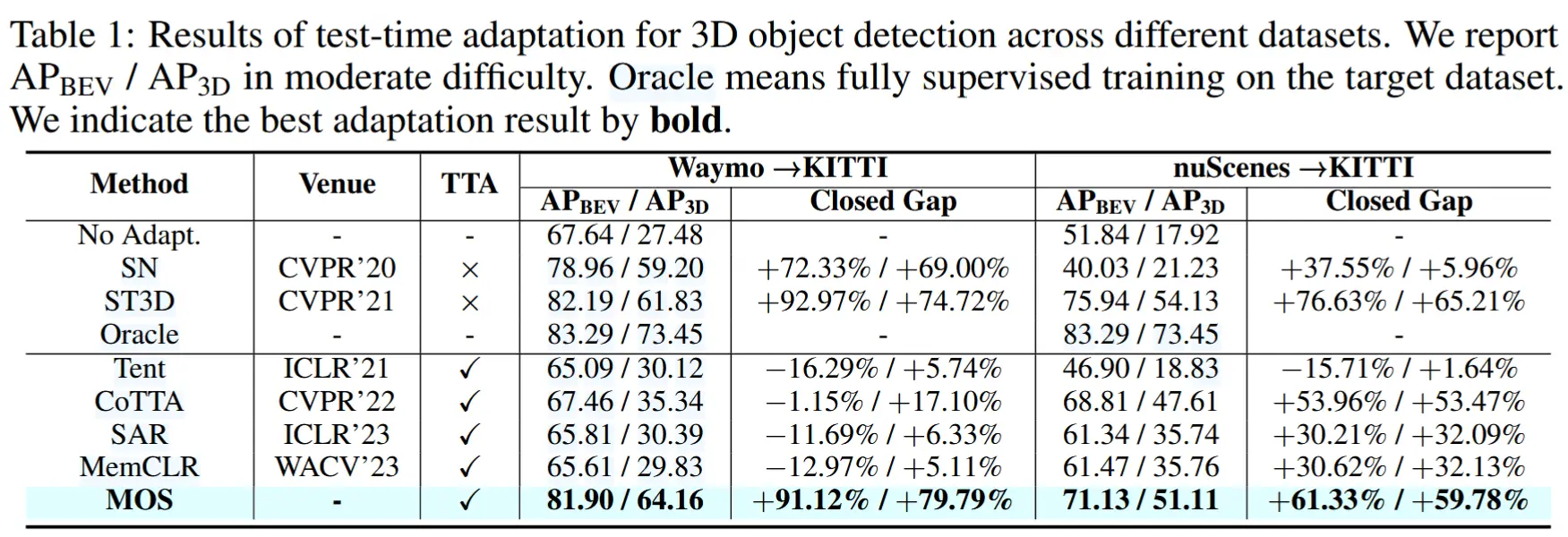
- 跨数据集偏移
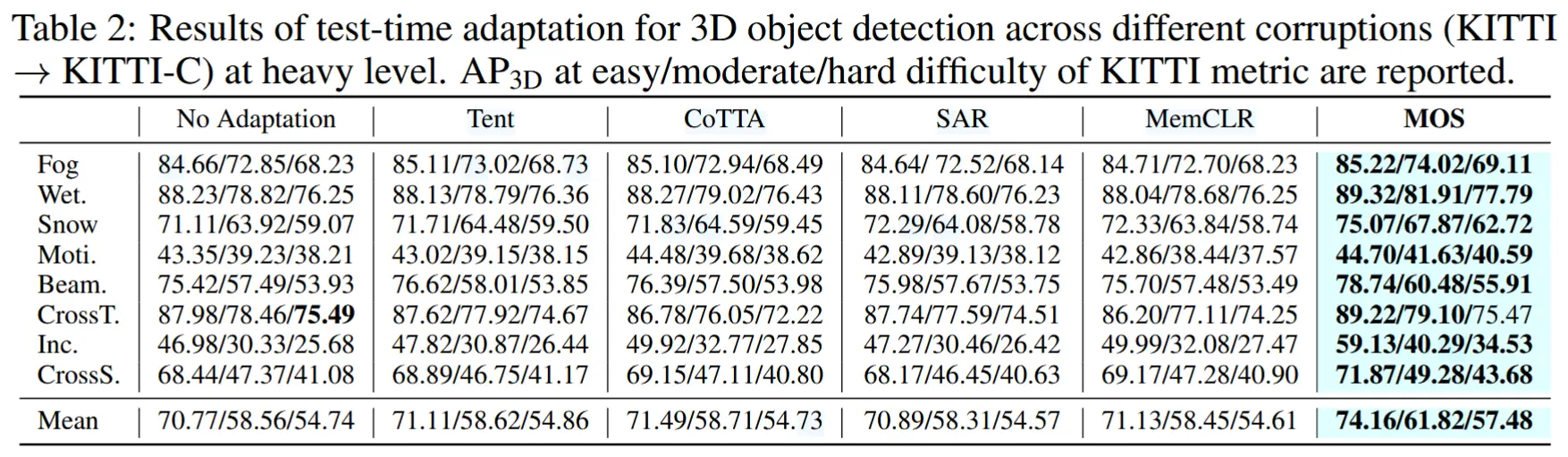
- 损坏偏移
- 跨损坏偏移 Crpss-corruption
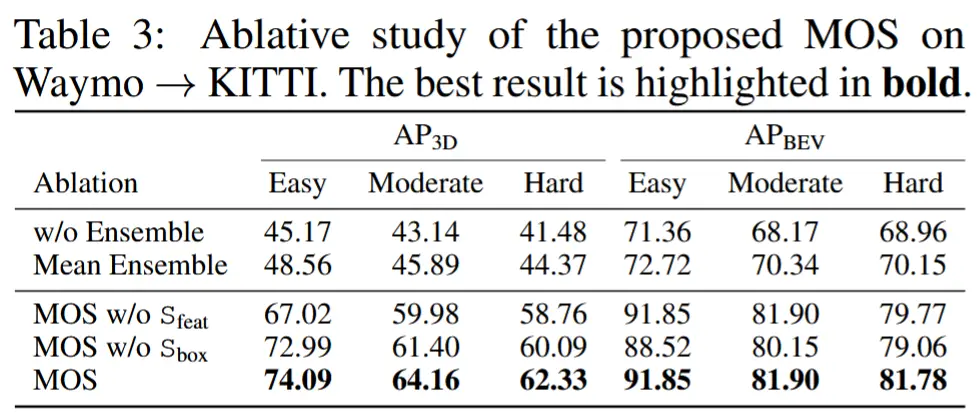
- 消融